
2024年8月
「自由」があるからこそ集団は頑丈になる!
~群れが魅せる驚くべき世界の探求~(前編)
今回、お話を伺うのは、動物生理化学、生理学、行動学などを専門とされている村上 久 助教です。
その中でも、人や動物の集団メカニズムの研究についてお話しいただきました。
村上先生のお話を伺い、気づかされたことは、私たちは普段から特に意識することなく、その時々に必要に応じて群れとなって行動しているということです。
横断歩道を渡る際は、自然と列をなして歩きますし、混んでいるエレベーターに乗る際も、自然と譲り合いながら群れとなって行動しています。
そこには、いったいどんなメカニズムが働いているのでしょうか。独自の視点で研究されている村上先生に、その面白い世界についてお話しいただきました。
集団のメカニズムは幅広い研究の基礎となり得る
私は、動物行動学や複雑系科学という分野で、集団や群れなどの行動メカニズムについて研究をしています。
私たちは、なぜ集団で行動するのでしょうか。
そして、どのようなメカニズムで集団となって行動しているのでしょうか。
たとえば、渋谷のスクランブル交差点の1日の歩行者数は、世界で最も多いとされていますが、青信号になると各方面から一斉に歩き出して、ときに自然と列をなし、ぶつかることなく交差点の中心で、すれ違い、渡り切ることができます。
そこには、言葉や合図などを使わずに、特に意図せずとも歩行者が群れとなって、うまく機能しているメカニズムがあります。
動物に関してもそうです。鳥や魚の群れは、鳴き声を使って号令をかけなくても、瞬時にダイナミックに群れの形を変えながら、連携し合い動いています。
よく考えてみると、すごく困難に思えることを、動物たちも私たちも、こうしよう、ああしようと具体的に考えることなく、いわば無意識に行っていることがわかります。

こういった現象は、日常に目を向けてみるとありふれているはずなのに、どうやってそれが起こっているのかは、実はまだよく分かっていません。私の研究は、この群れのメカニズムを解き明かすことにあります。
集団のメカニズムがわかれば、混雑による事故や渋滞を防ぐことに応用できたり、大きな施設を建てる前にあらゆるシミュレーションをして、人が密集しすぎない動線を作ることができるようになります。
動物や群れを超えて、あらゆる範囲に応用できる可能性
さらに視点を広げてみると、人や動物の群れを超えて、あらゆる問題や課題を解決する際の参考になるのではないかと考えています。
というのも、群れを「部分と全体の関係」という問題意識で捉えてみると、世の中のほとんどの現象や物事は、小さなものが集まった1つの群れとして機能しているとみることができるからです。
たとえば、会社や学校などの組織は、一人一人の個人が集まって機能している群れですし、私たちの体に目を向けてみると、意識や思考を司る脳も、1つ1つの神経細胞が集まって1つの脳として機能しています。
1つ1つの細胞は比較的単純な動きをしているのに、それらが群れとなると、全体として意識を持ちます。そう考えると、人間の脳の仕組みを理解する上で群れの研究は役立つのではないでしょうか。社会の在り方や体の仕組みを理解することにつながれば、あらゆる分野の研究に応用できる可能性があります。
前提を覆す発見との出会い
この分野は、2000年の後半に大きな転換期を迎えました。
それまでは、コンピューター上で作られた数理モデルを使って集団のメカニズムが研究されていたのですが、
2000年に入ると、高解像度のビデオカメラやハイスペックなコンピューターが誕生し、世の中にある実際の群れを撮影して、その群れをダイレクトに分析・研究できるようになったのです。
すると、コンピューター上で作られた理論では説明がつかない群れの現象がたくさん見つかり、新しい群れのモデルを作っていこうという機運が世界的に起こりました。

(群れを撮影する際に使用するビデオカメラ)
そんな時代の中で、当時の私も、ビデオカメラを持ち出して、実際に動物の群れを撮影しては、それらを分析するというフィールドワークを行いながら、群れの分析をしていました。
特に注力していたのは、ミナミコメツキガニや鮎(アユ)の研究です。
当時は、生き物の群れは、単純に秩序だって綺麗に整列しながら動いていると考えられていましたが、実際に鮎の群れの動きを1匹1匹トラッキングしてみると、短い時間で観ると秩序だって動いている魚も、より長い時間で観ると縦横無尽に動き回っていたのです。
一見すると無茶苦茶な個々の鮎の動きは、群れをかき乱してしまいそうですが、むしろ上手く群れとしてまとまるうえで役立っていると考えられます。
さらに研究をしていく中で、ある2つのポイントが群れを形成する上で重要だと分かってきました。
1つは、周りの動きを見て、どう動くかを「予期」しながら自分の動きを調整することが、頑丈な集団を作るのに役立っているのではないかということ。
2つ目は、周りと同じように動くのではなく、むしろ同期せずに自由に動いている方が、頑丈な群れを作ることができるのではないかということです。
この2つのポイントをさらに詳細に研究するために、この頃から歩行者を対象にした実験も始めました。
個人ではなく集団レベルで予期できることが重要
「予期」することが集団を作る上では大切だということは当時から言われていましたが、どのように影響しているか、詳しいことまでは分かっていませんでした。
そこで、横断歩道のセットを作り、集団で歩いてもらう実験をしました。
その際に、あえて「予期」できないような状況を作ったら、どのくらい集団が崩れるのかという検証をしました。
歩きスマホを使った実験
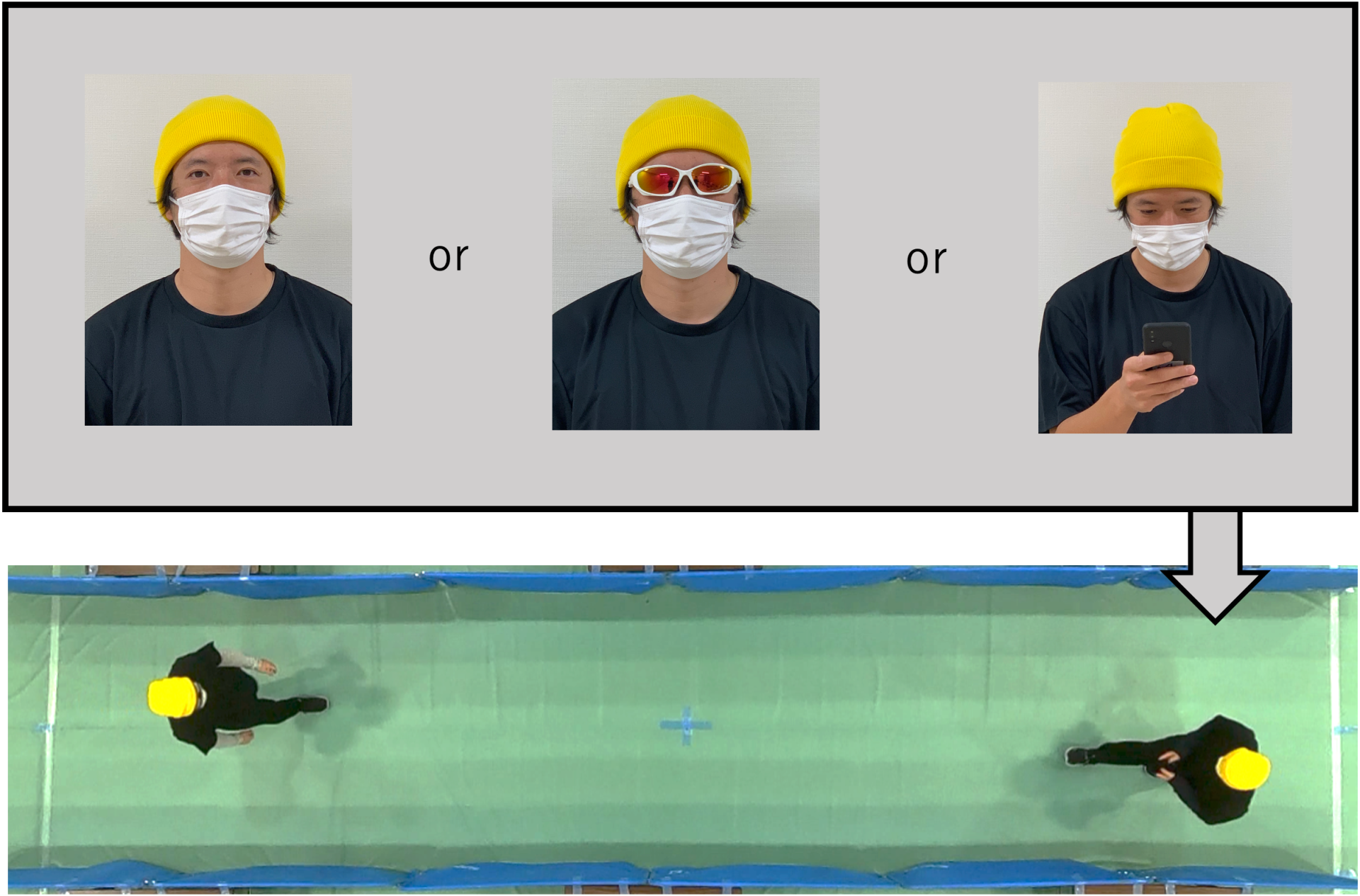
この実験では、横断歩道を左右から集団で渡り切ってもらう際に、例えば前にいる3人にだけ「歩きスマホ」をしてもらいます。
スマホを使うことで、視野は自然と狭くなり、周りの動きを見ることができなくなります。
あえて予期しにくい状況を作ることで、どのような弊害が生まれるでしょうか。
実際に歩いてもらった映像をご覧ください。
2つの群れが交わる際に、「歩きスマホ」をしている人を中心に列が乱れているのがわかります。誰も歩きスマホをせずに通常通り歩いた実験結果と比べると、列が生じるまでに多くの時間が必要になることもわかりました。
歩きスマホの人の歩行が乱れることは、ある程度予想していましたが、1人1人の動きをトラッキングしながら分析をかけると、歩きスマホをしていた人だけでなく、すれ違う人や近くにいる人もうまく歩けなくなることがわかりました。
歩きスマホの人をキッカケに、集団全体で予期できない状況が生まれ、乱れていったと考えられます。
サングラスをかけた実験
この実験を通して、群れの状態を維持するためには、予期することが個人だけではなく、集団レベルで大切だということがわかりました。
では、人は相手の何を参考に予期しているのでしょうか。
ある研究では、「相手の目線」の動きを参考にしながら、人は予期しているのではないかと言われています。
そこで、「相手の目線」がどのくらい役立っているのかを検証するために、サングラスを使って、二人がすれ違う際の振る舞いを調べる実験を行うことにしました。
向こう側から歩いてくる歩行者にサングラスをつけてもらうことで、相手の目線を確認できないようにしたのです。
通説が正しければ、相手の目線を見ることができないので、予期できずに歩行が乱れるはずです。
実際に何度も歩いてもらい、歩行者の動きをトラッキングして軌跡を辿り、分析をかけてみたところ、通説に反する結果になりました。
以下のグラフは、歩行者の動きがどれくらい左右にズレたかを表しているものです。すれ違うタイミングでは、相手を避けようとして体が左右に動くので、一番大きくズレが出ることになります。
青色の線がサングラスをつけていない人のズレで、赤色の線がサングラスをつけている歩行者のズレになります。
この両者のグラフの重なりを見ると、驚いたことにズレにほとんど差がないことがわかります。二人ともサングラスをつけずにすれ違う実験でのズレとも、ほとんど差はありませんでした。相手の目線が見えなくても問題なく歩けたということです。

これは、人が周りの歩行者の動きを予期する上で、目線は重要ではないことを強く示唆しています。
予期できない状況が集団へ波及していく
反対に、サングラスではなく歩きスマホで検証してみたところ、すれ違う歩行者は歩きスマホの人を大きく避けるようにして歩く結果となりました。おそらく、歩きスマホの人がどのように動くのか予期できずに大きく避けたのでしょう。
歩きスマホの人も予期ができずに歩行が乱れますし、すれ違う人も大きく避けようとして歩行が乱れます。集団で歩いている場合には、さらにその周りにいる人も、という形でどんどん予期できない状況が波及していくことになります。
これらの実験を通して、頑丈な集団を作るには、個体レベルではなく、集団の中にいる全員が「予期」できることが非常に重要だと分かってきました。

その一方で、さらに面白い発見もありました。それは、想定より人の群れは持ちこたえたことです。
一時的に集団が乱れはするものの、崩壊せずに立て直すことができるという人の群れの頑丈さです。ここにはどのようなメカニズムが働いているのか。これからの研究テーマの一つになりそうです。
研究者プロフィール

主な発表論文・関連特許
Robust spatial self-organization in crowds of asynchronous pedestrians
著者名:Takenori Tomaru; Yuta Nishiyama; Claudio Feliciani; Hisashi Murakami 掲載誌名:Journal of The Royal Society Interface
出版年月:2024年05月
Adaptive Formation by Pedestrian Small Groups During Egresses
著者名:Hisashi Murakami; Claudio Feliciani; Katsuhiro Nishinari
掲載誌名:Journal of Disaster Research
出版年月:2024年04月
Toward Comparative Collective Behavior to Discover Fundamental Mechanisms Behavior in Human Crowds and Nonhuman Animal Groups
著者名:Hisashi Murakami; Masato S. Abe; Yuta Nishiyama
掲載誌名:Journal of Robotics and Mechatronics
出版年月:2023年08月
Spontaneous behavioral coordination between avoiding pedestrians requires mutual
anticipation rather than mutual gaze
著者名:Hisashi Murakami; Takenori Tomaru; Claudio Feliciani; Yuta Nishiyama
掲載誌名:iScience
出版年月:2022年11月
Mutual anticipation can contribute to self-organization in human crowds
著者名:Hisashi Murakami; Claudio Feliciani; Yuta Nishiyama; Katsuhiro Nishinari
掲載誌名:SCIENCE ADVANCES
出版年月:2021年03月
- 産学連携や研究支援に興味がある方(産学公連携推進センターHP)
- 紹介教員にメッセージを送りたい方(メッセージフォーム)
- 大学や学生を支援したい方(基金事業)
- 受験を考えている方(入試情報)
- 大学全体について知りたい方(京都工芸繊維大学HP)

