2024年2月
体内で活躍する「超微細ロボット」の実現を目指して
~細胞の仕組みを利用した、目に見えないサイズのロボット~(前編)
今回お話を伺うのは、ナノマイクロシステムの研究をされている外岡大志准教授です。
お話しいただくテーマは「小さなロボット」の開発について。
小さいといっても私たちの想像をはるかに超えるサイズで、なんと人体の中で動きまわれるほど小さなサイズだとおっしゃっています。
いったいどのようなロボットなのでしょうか。
これまでとは一線を画した画期的なロボットについてたっぷりとお話しいただきました。
体内で活躍する小さなロボット
「小さいロボット」と聞くと、どんなサイズのものをイメージしますか?
ビー玉くらいのものをイメージされる方もいらっしゃれば、薬のカプセルのようなすごく小さなものかもしれません。 人によってイメージはさまざまですが、我々が作ろうとしているロボットはおそらく皆さんが考える以上にもっと小さいと思います。

サイズとしては肉眼では見られないナノメートル単位のロボットで顕微鏡でやっと確認できるサイズです。
それでいて通常サイズのロボットと同じように動くロボットの開発をしています。
ロボットと聞くと大きければ大きいほど、それだけパワフルで、できることも多くなるイメージがあるかもしれませんが、実は小さければ小さいほど活躍できる範囲が広くなるのも事実です。
たとえば、医療の現場です。
現在我々が開発しているロボットは将来的には医療の分野で使われることを想定しています。
薬のカプセルくらい小さいロボットであれば、内視鏡として人体の中に入れて中の様子を撮影し診察することができますが、目に見えないナノサイズであれば、もっと色んなことができるようになります。
血液の中に入れ、血液の流れに乗って全身を巡り、悪いところや病気になりそうなところを診断し、その場でロボットが対処することができたり、もしかすると、メスを入れずともロボットが体内で治療を行えるようになったりする可能性もあります。
このように、最終的には、ロボットが人体の中で診断から治療までを自動でやってくれるような世界を目指したいと考えています。ナノメートルサイズのロボットがあなたの主治医になるようなイメージでしょうか。
普通のアプローチでは作れない「小さなロボット」の作り方
通常、ロボットを作る場合は、ネジや歯車などの機械部品を組み合わせながら作りますが、このアプローチだと、どれだけ小さくても数ミリメートルくらいのサイズが限界となってしまうでしょう。
部品であるネジをどれだけ小さくしたとしても、それだけで数ミリサイズになってしまうので、そもそも機械部品を使ってロボットを作るという発想自体から離れなければなりません。
また、それだけ小さいと高度な機能を持たせることができず、機械部品で作ることができたとしても、ごく単純な動きをするだけになってしまいます。
では、機械部品を使えないとしたら、一体何を使ってロボットを作れば良いのでしょうか。
我々が注目したのは私たちの身体に備わっている「細胞」です。
細胞とロボット、一見すると何の繋がりもないように思えますが、細胞の働きを見てみると実はロボットと同じようなプロセスで動いていることがわかります。 ロボットは通常、以下のような一連のプロセスを繰り返しています。
———————————————————————————-
①情報を検知 → ②その情報を処理 →③アウトプット
———————————————————————————-
イメージしやすいのはペッパーくんのような人型ロボットだと思いますが、このプロセスに当てはめて考えてみると、
———————————————————————————-
① 情報を検知:「こんにちは」と話しかけられた言葉をロボットが検知
②情報を処理:検知した言葉を分析し、どのように返答するかを弾き出す
③アウトプット:「こんにちは」と返答する
———————————————————————————-
となります。
では、細胞の反応もこちらのプロセスに当てはめて考えてみたいと思います。
たとえば、ウィルスが体の中に入った時の細胞の反応を見てみましょう。 先ほどのプロセスに当てはめてみると、
———————————————————————————-
① 情報を検知:ウィルスが体内にいることを細胞が検知
②情報を処理:検知したウィルスを分析しそれに対抗するための抗ウィルス物質を作る
③アウトプット:抗ウィルス物質を細胞から放出する
———————————————————————————-
このようにみてみると、細胞もロボットと同じように「 情報を検知→処理→アウトプット 」という一連のプロセスを繰り返していることがわかります。
ロボットと同じような動きをするものが、実はこんなにも身近なところにあったということです。
しかも、細胞はマイクロメートルサイズで、細胞を構成している材料はナノメートルサイズなのです。 これに気づいた時は、細胞の仕組みを活用しない手はないと考えました。

細胞と同じ材料を人工的に作り、細胞と同じ仕組みでロボットを組み立てれば、ナノメートルサイズの小さいロボットを作ることができるのではないかと考え、そこから研究がスタートしました。 これが現在私が開発している「細胞型微小ロボット」なのです。
ロボットに情報を検知する機能を持たせる
細胞を参考にする上で特に注目したのが、
- 細胞の表面部分にある「膜タンパク質」
- 細胞の中にある「遺伝子回路」
です。
なぜならこの2つは、先ほどのロボットの3つのプロセスに極めて近い働きをしているからです。
まず着目したのが「膜タンパク質」というタンパク質で、細胞の表面にある細胞膜の中に存在しています。
細胞を覆っている細胞膜は基本的には物質を通すことはありませんが、この「膜タンパク質」があることで、細胞の外から中へ、中から外へ物質を輸送することができるようになります。
つまり細胞の中と外にある物質や情報を伝達する橋渡しのような役割を果たしてくれているのです。
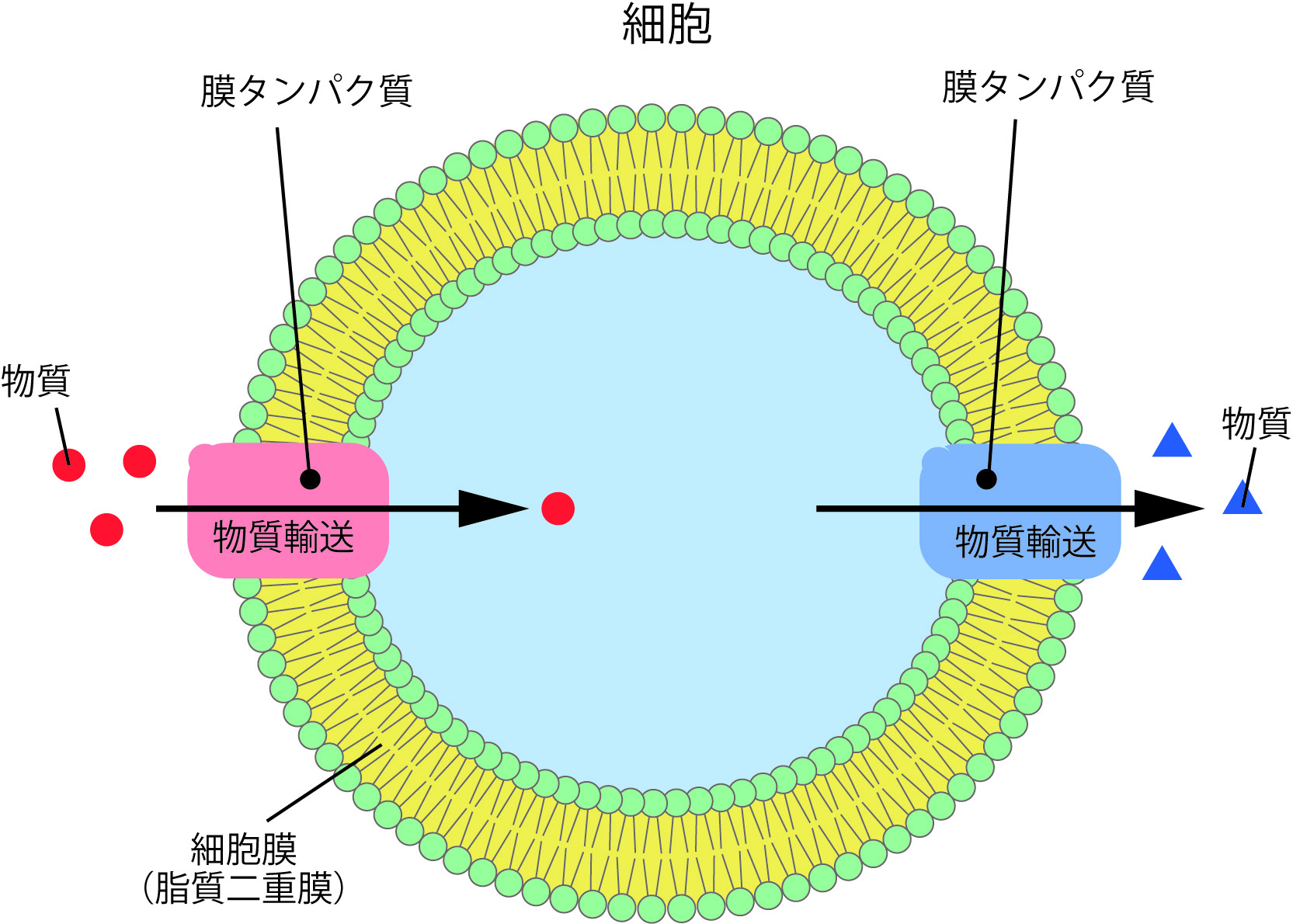
ロボット的な観点から見てみると、
- 外から中へ物質や情報を伝達する仕組みは、先ほどのプロセスの「①情報の検知」機能に使うことができ、
- 中から外へ伝達する仕組みは「③アウトプット」機能に応用することができると考えました。
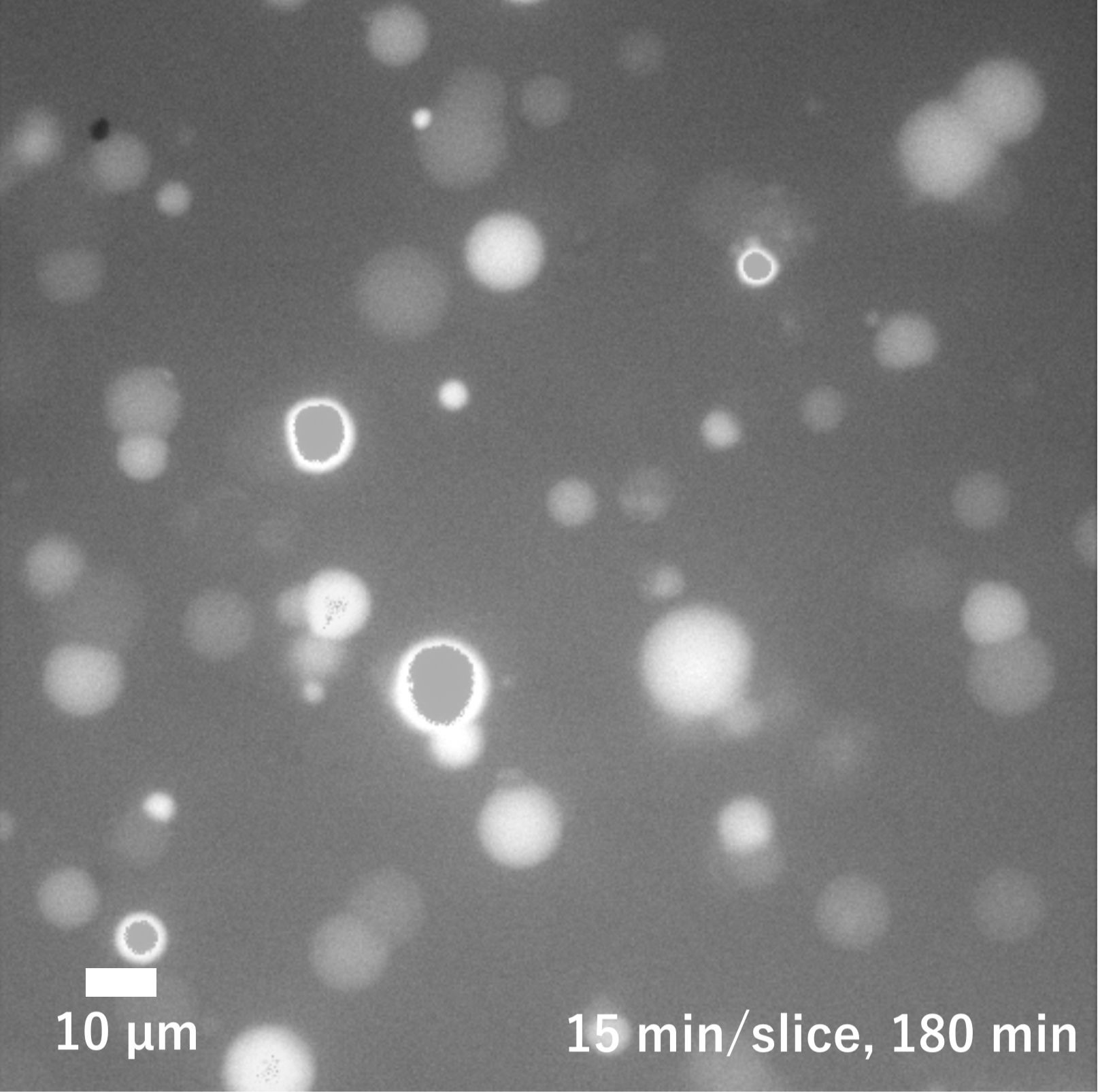
ですので、膜タンパク質に使われている材料や仕組みを利用することで、小さなロボットに情報の検知機能や物質を外へ放出するアウトプット機能を持たせることができるようになるということです。実際に我々の研究室では、膜タンパク質の物質輸送機能を調べるため、独自のシステムを開発し、様々な実験をしながら研究を行っています。
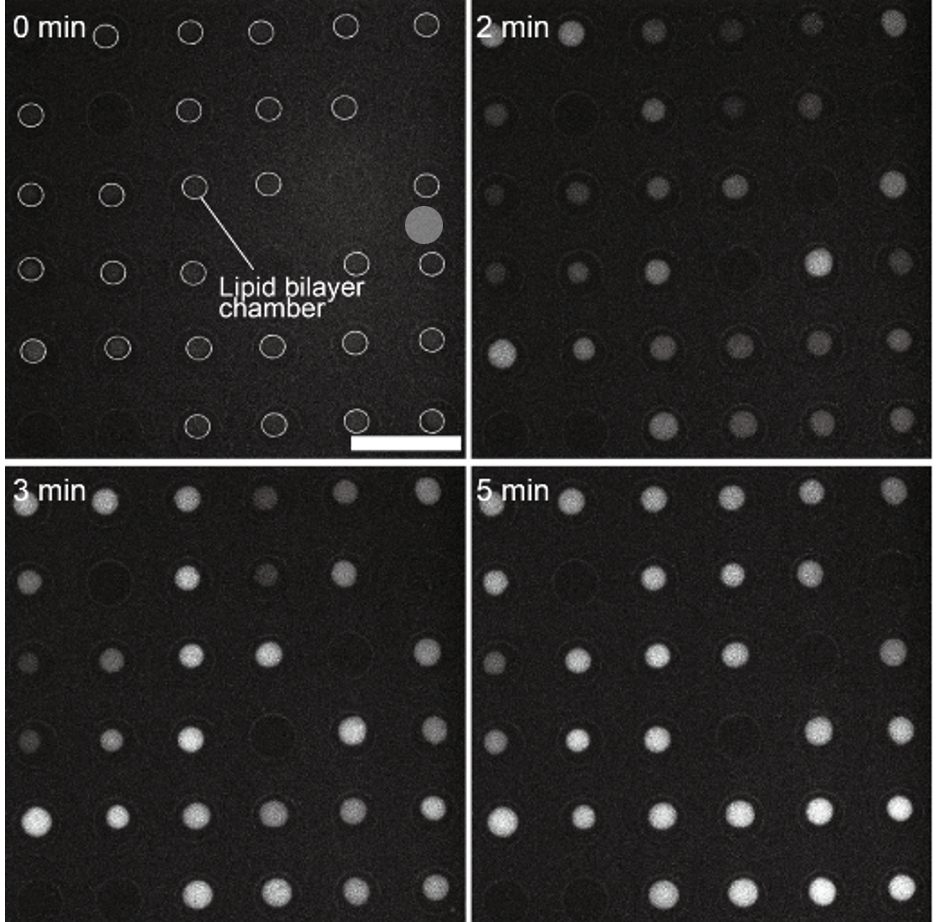
(出典:Tonooka et al., Lipid bilayers on a picoliter microdroplet array for rapid fluorescence detection of membrane transport, Small, 2014)
情報処理機能を持たせる
膜タンパク質の機能を使って、情報を検知する機能を加えたとしても、検知した情報を処理して何かアクションを起こさなければ、ロボットとしての機能を果たせません。
そこで情報処理機能を持たせるために、細胞の中にある「遺伝子回路」に着目しました。
この遺伝子回路はロボットでいうところの情報処理の役割を担っています。膜タンパク質を伝って中に入ってきた物質や情報を分析し、それに対してどう反応するかを考えてくれます。
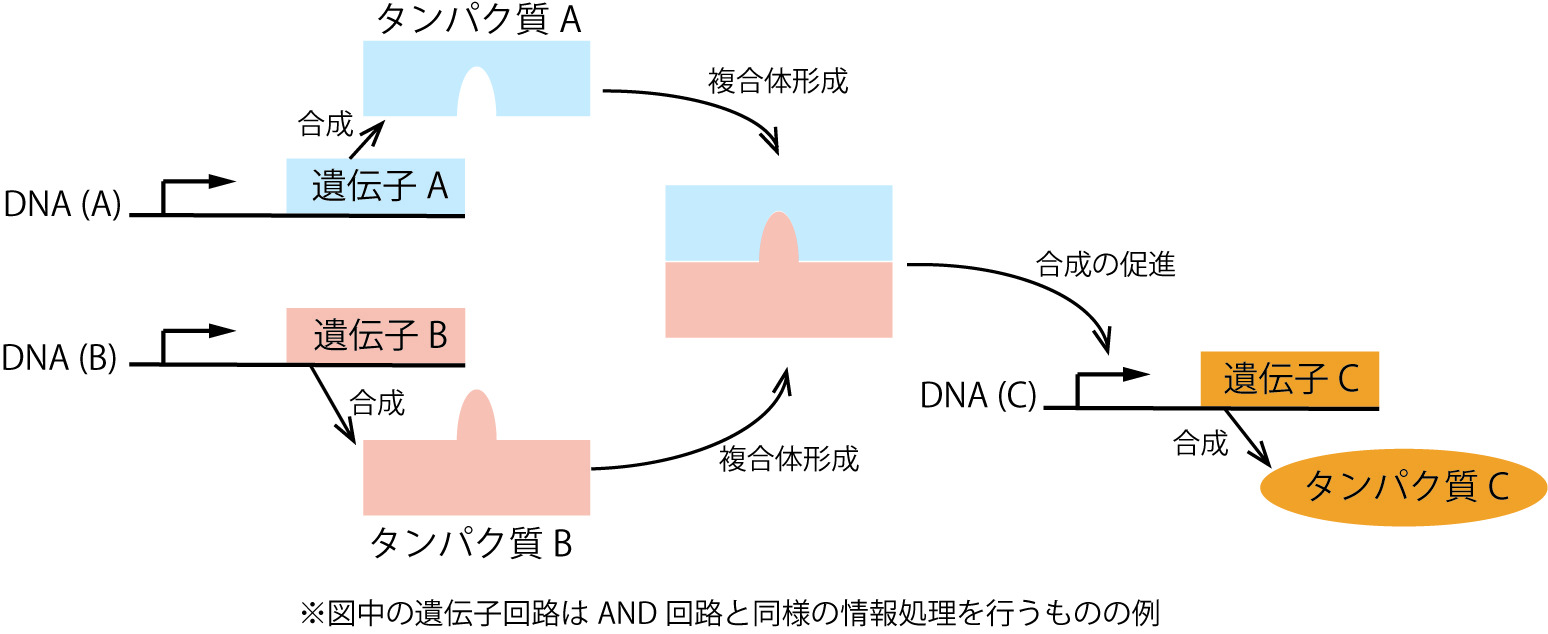
先ほどの3つのプロセスでいう②情報処理を担うプロセッサーのような働きをしています。
以上のように、「膜タンパク質」と「遺伝子回路」の材料や仕組みを利用することで、機械部品を使わなくてもナノメートルサイズの小さなロボットとしての機能を持たせることができるようになります。
近年、バイオ分野の研究は盛んになり、日進月歩で発展していますが、ロボットを作るという観点からバイオを研究している人は極めて少ないと思います。細胞を参考にすれば、あらゆる機能を細胞サイズあるいは細胞よりも小さなサイズで作ることが可能になり、ロボットの可能性はさらに広がっていくでしょう。
そこで、後編では我々が開発している様々な機能の一例を紹介したいと思います。
(後編に続く)
研究者プロフィール

- 紹介教員を見る
研究者ハンドブック
主な発表論文・関連特許
Microplastic particle trapping through microfluidic devices with different shaped pillars
著者名 :Atsuhide Kitagawa; Mirano Ota; Tomoaki Watamura; Taishi Tonooka; Yuichi Murai
掲載誌名 : Chemical Engineering Science
出版年月 : 2022年12月
Rapid, affordable, and uncomplicated production of bacterial cell-free lysate
著者名 : Robert M. Cooper; Taishi Tonooka; Andriy Didovyk; Jeff Hasty
掲載誌名 : Journal of Visualized Experiments
出版年月 : 2021年10月
Lipid bilayer on a microdroplet integrated with a patterned Ag/AgCl microelectrode for voltage-clamp fluorometry of membrane transport
著者名 : Taishi Tonooka; Toshihisa Osaki; Koji Sato; Ryuji Kawano; Shoji Takeuchi
掲載誌名 : Sensors and Actuators, B: Chemical
出版年月 : 2021年05月
Microfluidic device with an integrated freeze-dried cell-free protein synthesis system for small-volume biosensing
著者名 : Taishi Tonooka
掲載誌名 : Micromachines
出版年月 : 2021年01月
Construction of an artificial cell capable of protein expression at low temperatures using a cell extract derived from Pseudomonas fluorescens
著者名 : Mana Fukumoto; Taishi Tonooka
掲載誌名 : Processes
出版年月 : 2021年01月
- 産学連携や研究支援に興味がある方(産学公連携推進センターHP)
- 紹介教員にメッセージを送りたい方(メッセージフォーム)
- 大学や学生を支援したい方(基金事業)
- 受験を考えている方(入試情報)
- 大学全体について知りたい方(京都工芸繊維大学HP)